构型空间
关于机器人可以提出的最基本问题也许是,它在哪里?
答案由机器人的构型给出:对机器人所有点位置的规范。
由于机器人的连杆是刚性的且具有已知形状,因此只需要很少的数字来表示其构型。例如,
- 门的构型可以用单个数字表示,即绕其铰链的角度
。 - 平面上的点的构型可以用两个坐标
描述。 - 平放在桌子上正面朝上的硬币的构型可以用三个坐标描述:两个坐标
指定硬币上特定点的位置,一个坐标 指定硬币的方向。
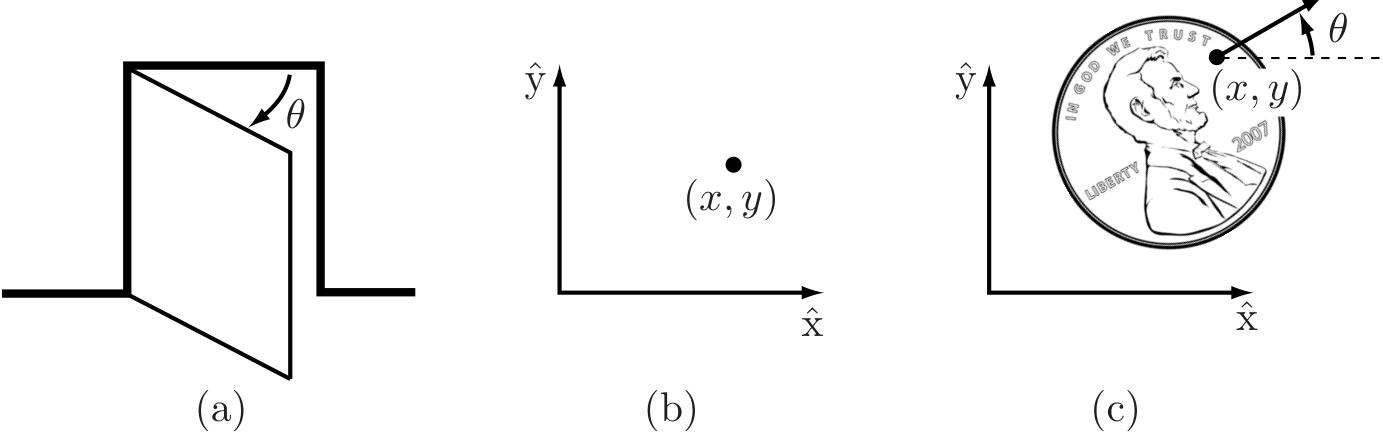
图2.1:(a) 门的构型由角度
上述坐标都取连续实数范围内的值。机器人的自由度 (dof) 数量是表示其构型所需的实值坐标的最小数量。
在上面的例子中,门有一个自由度。平放在桌子上正面朝上的硬币有三个自由度。即使硬币可以正面朝上或反面朝上,其构型空间仍然只有三个自由度;第四个变量,表示硬币的哪一面朝上,取离散集合{正面, 反面}中的值,而不是像其他三个坐标那样取连续实值范围内的值。
机器人的构型是对机器人每一点位置的完整规范。表示构型所需的实值坐标的最小数量
包含机器人所有可能构型的
本章我们研究一般机器人的C空间和自由度。
由于我们的机器人由刚性连杆构成,
- 我们首先研究单个刚体的自由度,
- 然后一般多连杆机器人的自由度。
- 接下来我们研究C空间的形状(或拓扑)和几何及其数学表示。
- 本章最后讨论机器人末端执行器的C空间,其任务空间。
在下一章中,我们将更详细地研究单个刚体C空间的数学表示。
基本章节
刚体的自由度
机器人的自由度
构型空间的拓扑与表示
构型与速度约束
任务空间与工作空间
总结
-
机器人机械地由通过各种类型关节连接的连杆构成。连杆通常建模为刚体。诸如夹爪等末端执行器可以附着在机器人的某个连杆上。执行器向关节传递力和力矩,从而引起机器人的运动。
-
最广泛使用的单自由度关节是旋转关节,它允许绕关节轴旋转,以及移动关节,它允许沿关节轴方向平移。一些常见的两自由度关节包括圆柱关节,它通过串联连接旋转和移动关节构成,以及万向节,它通过正交连接两个旋转关节构成。球关节,也称为球窝关节,是一个三自由度关节,其功能类似于人类肩关节。
-
刚体的构型是对其所有点位置的规范。对于在平面中运动的刚体,需要三个独立参数来指定构型。对于在三维空间中运动的刚体,需要六个独立参数来指定构型。
-
机器人的构型是对其所有连杆构型的规范。机器人的构型空间是所有可能机器人构型的集合。C空间的维度是机器人的自由度数量。
-
机器人的自由度数量可以使用Grübler公式计算,
其中
-
机器人的C空间可以显式参数化或隐式表示。对于具有
个自由度的机器人,显式参数化使用 个坐标,这是最少必要的。隐式表示涉及 个坐标且 ,这 个坐标受到 个约束方程的限制。使用隐式参数化,机器人的C空间可以被视为嵌入在更高维度 空间中的维度 的曲面。 -
结构包含一个或多个闭环的
自由度机器人的C空间可以使用 个形式为 的闭环约束方程隐式表示,其中 且 。这种约束方程称为完整约束。假设 随时间 变化,完整约束 可以对 求导得到
其中
- 机器人的运动也可能受到形式为
的速度约束,其中
这种约束称为非完整约束,或不可积约束。这些约束减少了系统可行速度的维度,但不减少可达C空间的维度。非完整约束出现在受动量守恒或无滚动滑动约束的机器人系统中。
- 机器人的任务空间是可以自然表达机器人任务的空间。机器人的工作空间是对机器人末端执行器可以到达的构型的规范。
2.7 注释和参考文献
在运动学文献中,由通过关节连接的连杆组成的结构也称为机构或连杆机构。自由度的数量