聚类
Clustering
聚类是机器学习中一种重要的无监督学习任务。其目标是根据数据样本之间的相似性或距离,将数据集中的样本划分为若干个簇 (Clusters),使得同一簇内的样本相似度高,而不同簇之间的样本相似度低。
聚类算法的性能高度依赖于如何定义样本之间的“相似性”或“距离”。距离度量
聚类与分类的对比
- 聚类 (Clustering): 无监督学习。数据没有预先定义的标签。算法的任务是发现数据中固有的结构,将相似的样本自动分组。
- 分类 (Classification): 有监督学习。数据有预先定义的类别标签。算法的任务是学习一个映射函数,将新样本分配到已知的类别中。
一、基于划分的聚类 (Partitioning-based Clustering)
这类算法将数据划分为预先指定数量的簇,每个簇代表一个数据子集。
- K-Means
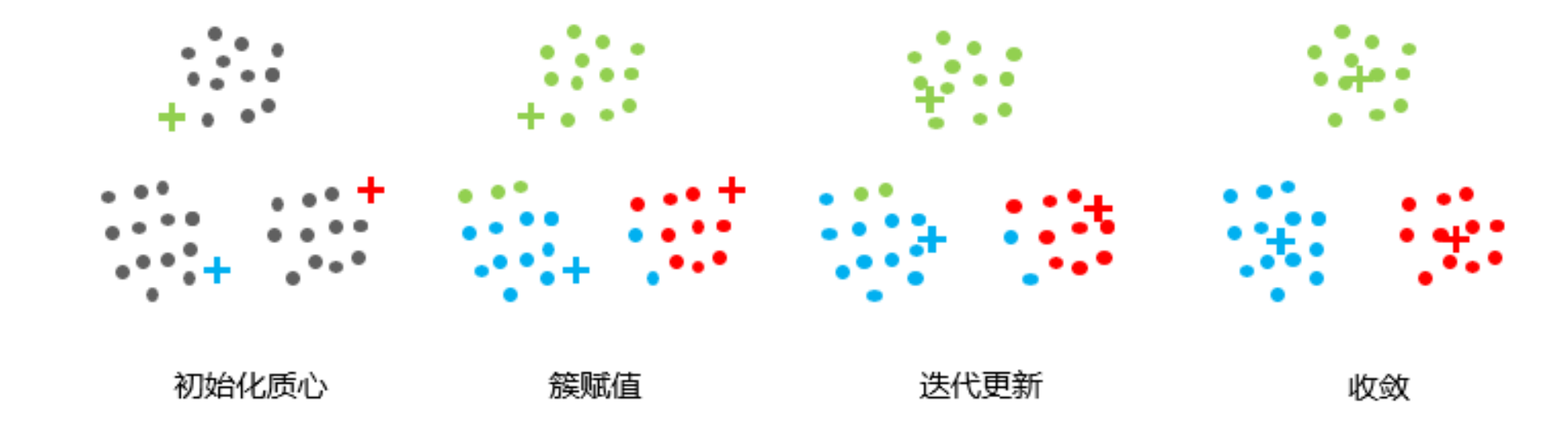
- 原理: 迭代地将数据点分配到最近的簇中心,然后重新计算簇中心,直到收敛。
- 目标函数: 最小化所有数据点到其所属簇中心的平方距离之和(簇内平方和)。
其中
- 算法步骤:
- 初始化: 随机选择
个数据点作为初始簇中心。 - 分配: 将每个数据点分配到距离其最近的簇中心。
- 更新: 重新计算每个簇的中心(通常是簇内所有点的均值)。
- 迭代: 重复步骤2和3,直到簇中心不再变化或达到最大迭代次数。
-
优缺点:
-
优点: 简单、高效,适用于大规模数据集。
-
缺点: 需要预先指定
值;对初始中心敏感;容易陷入局部最优;对噪声和异常值敏感;只能发现球形簇。 -
K-Medoids (PAM): K-Means的变体,使用簇内实际数据点作为中心(medoid),对异常值更鲁棒。
具有一个迭代过程,数据集被分组成若干个预定义的不重叠的聚类或子组,数据点分配给簇,以便簇的质心和数据点之间的平方距离之和最小,在这个位置,簇的质心是簇中数据点的算术平均值
算法流程:
- 选择 K 个点作为初始质心。 (簇的质心必须小于训练数据点的数目)
- 将每个点指派到最近的质心,形成 K 个簇。(遍历所有数据点,计算所有质心与数据点之间的距离,簇将根据与质心的最小距离而形成)
- 对于上一步聚类的结果,进行平均计算,得出该簇的新的聚类中心。 (迭代地将质心移动到一个新位置。取一个簇的数据点,计算它们的平均值,然后将该簇的质心移动到这个新位置。对所有其他簇重复相同的步骤。)
- 重复上述两步/直到迭代结束:质心不发生变化。(直到质心停止移动,即它们不再改变自己的位置,收敛。)
肘部法则选择 K 值:肘点之前代价函数的值会迅速下降,肘点之后代价函数的值会就下降得非常慢。一般选择肘点。(比较多次运行 K-均值的结果,选择代价函数最小的结果)
- 优点:原理比较简单,实现也是很容易,收敛速度快;聚类效果较优;可解释度比较强;要调参的参数仅仅是簇数 K
- 缺点:需要预先指定簇的数量;无法处理异常值和噪声数据;不适用于非线性数据集;高度重叠的数据,那么它就不能被区分;随机选择质心结果不理想;欧几里德距离可以不平等的权重因素,限制了能处理的数据变量的类型;
二、基于密度的聚类 (Density-based Clustering)
这类算法根据数据点的密度来发现任意形状的簇,并能识别噪声点。
- DBSCAN (Density-Based Spatial Clustering of Applications with Noise)
- 原理: 基于两个参数:
(邻域半径)和 (最小点数)。它将数据点分为三类: - 核心点 (Core Point): 在其
邻域内至少有 个点。 - 边界点 (Border Point): 在其
邻域内点的数量少于 ,但它位于某个核心点的 邻域内。 - 噪声点 (Noise Point): 既不是核心点也不是边界点。
- 核心点 (Core Point): 在其
- 优缺点:
- 优点: 能发现任意形状的簇;能有效识别噪声点;无需预先指定簇的数量。
- 缺点: 参数选择困难;对密度不均匀的数据集效果不佳;不适用于高维数据。
- 原理: 基于两个参数:
Density-Based Spatial Clustering of Applications with Noise
如果 S 中任两点的连线内的点都在集合 S 内,那么集合 S 称为凸集。反之,为非凸集
基于密度的聚类算法:将簇定义为密度相连的点的最大集合,能够把具有足够高密度的区域划分为簇,并可在噪声的空间数据库中发现任意形状的聚类。
使用两个超参数:扫描半径 (eps) 和最小包含点数 (minPts) 来获得簇的数量:
- 扫描半径 eps : 用于定位点/检查任何点附近密度的距离度量,即扫描半径。
- 最小包含点数 minpts :聚集在一起的最小点数(阈值),该区域被认为是稠密的
密度定义为:空间中任意一点的密度是以该点为圆心,以扫描半径构成的圆区域内包含的点数目
将数据点分为三类
- 核心点:在半径 Eps 内含有超过 MinPts 数目的点。
- 边界点:在半径 Eps 内点的数量小于 MinPts, 但是落在核心点的邻域内的点。
- 噪音点:既不是核心点也不是边界点的点。
算法流程:
- 将所有点标记为核心点、边界点或噪声点;(对每个点计算其扫描半径 Eps 的点的集合,如果集合内个数大于 MinPts,称为核心点;查看剩余点是否在核点的邻域内,若在,则为边界点,否则为噪声点。)
- 如果选择的点是核心点,则找出所有从该点出发的密度可达对象形成簇; (将距离不超过 Eps 的点相互连接,构成一个簇)
- 如果该点是非核心点,将其指派到一个与之关联的核心点的簇中;
- 重复以上步骤,直到所点都被处理过
三、基于层次的聚类 (Hierarchical-based Clustering)
这类算法通过构建一个嵌套的簇结构(树状图或谱系图)来组织数据。
- 凝聚式聚类 (Agglomerative Clustering): 自底向上。开始时每个数据点都是一个簇,然后逐步合并最相似的簇,直到所有点合并成一个大簇或达到停止条件。
- 分裂式聚类 (Divisive Clustering): 自顶向下。开始时所有数据点都在一个簇中,然后逐步分裂最大的簇,直到每个点都是一个簇或达到停止条件。
层次聚类假设簇之间存在层次结构,将样本聚到层次化的簇中,属于硬聚类。(硬聚类:一个样本只能属于一个簇,或簇的交集为空集;软聚类:一个样本可以属于多个簇,或簇的交集不为空集)
3.1 分裂聚类(自上而下)
开始将所有样本分到一个簇;之后将已有类中相距最远的样本分到两个新的簇;重复此操作直到满足停止条件;得到层次化的类别
3.2 聚合聚类(自下而上)
开始将每个样本各自分到一个簇;之后将相距最近的两簇合并,建立一个新的簇;重复此操作直到满足停止条件;得到层次化的类别
四、基于模型的聚类 (Model-based Clustering)
这类算法假设数据是由某种概率分布(如高斯分布)生成的,并尝试找到最能解释数据生成过程的参数。
- 高斯混合模型 (Gaussian Mixture Model, GMM): 假设数据是由多个高斯分布的混合生成的。它使用期望最大化(EM)算法来估计每个高斯分量的参数(均值、协方差、权重)。
聚类评估指标
由于聚类是无监督的,评估其效果比分类更复杂。
-
内部评估指标 (Internal Evaluation): 不依赖真实标签,仅根据聚类结果本身来评估。
- 轮廓系数 (Silhouette Coefficient): 衡量一个点与其自身簇的相似度以及与其他簇的相异度。值范围
,越高越好。 - Davies-Bouldin Index: 衡量簇内距离与簇间距离的比率,越低越好。
- 轮廓系数 (Silhouette Coefficient): 衡量一个点与其自身簇的相似度以及与其他簇的相异度。值范围
-
外部评估指标 (External Evaluation): 需要真实标签来评估聚类结果与真实标签的匹配程度。
- 调整兰德指数 (Adjusted Rand Index, ARI): 衡量两个聚类结果(一个是你算法的,一个是真实标签的)之间的一致性,范围
,越高越好。 - 同质性 (Homogeneity): 每个簇只包含单一类别的样本。
- 完整性 (Completeness): 相同类别的样本都被分到同一个簇中。
- 调整兰德指数 (Adjusted Rand Index, ARI): 衡量两个聚类结果(一个是你算法的,一个是真实标签的)之间的一致性,范围
-
均一性:
类似于精确率,一个簇中只包含一个类别的样本,则满足均一性。也可以认为是正确率 (每个聚簇中正确分类的样本数占该聚簇总样本数的比例和) -
完整性:
类似于召回率,同类别样本被归类到相同簇中,则满足完整性;(每个聚簇中正确分类的样本数占该类型的总样本数比例的和) -
V-measure:均一性和完整性的加权平均( 𝛽 默认为 1)

-
轮廓系数:越接近 1 表示样本
聚类越合理;越接近-1,表示样本 应该分类到另外的簇中;近似为 0 ,表示样本 应该在边界上。簇内不相似度: 计算样本𝑖到同簇其它样本的平均距离为𝑎(𝑖),应尽可能小。簇间不相似度: 计算样本𝑖到其它簇𝐶𝑗的所有样本的平均距离𝑏𝑖𝑗,应尽可能大。 -
调整兰德系数 Adjusted Rnd Index: ARI 取值范围为
,值越大意味着聚类结果与真实情况越吻合,衡量的是两个数据分布的吻合程度

聚类效果示例 (Mermaid)
graph TD
subgraph 聚类算法效果示意
A["原始数据 (无标签)"] --> B{K-Means};
B --> C(发现球形簇, 对噪声敏感);
A --> D{DBSCAN};
D --> E(发现任意形状簇, 识别噪声);
A --> F{层次聚类};
F --> G(生成树状图, 可视化合并/分裂过程);
end
style C fill:#fff,stroke:#333,stroke-width:2px
style E fill:#fff,stroke:#333,stroke-width:2px
style G fill:#fff,stroke:#333,stroke-width:2px使用场景
医疗:使用聚类算法来发现疾病;市场细分:了解用户群,然后对每个客户进行归类;金融业:观察到可能的金融欺诈行为;搜索引擎:聚类的相似结果;社交网络:给朋友进行分组
市场细分、文档聚类、图像分割、图像压缩、聚类分析、特征学习或者词典学习、确定犯罪易发地区、保险欺诈检测、公共交通数据分析、IT 资产集群、客户细分、识别癌症数据、搜索引擎应用、医疗应用、药物活性预测