单回路反馈控制系统
Single Loop Feedback Control System
结构简单,却解决了实际生产过程中的大量控制问题。
最简单、最基本;应用最广泛、最成熟,是各种复杂控制系统设计和参数整定的基础。适用于被控对象滞后时间较小,负载和干扰不大,控制质量要求不很高的场合。
一、执行器和控制器的正反作用选择
执行机构的作用方式确定后,再确定执行机构及调节机构的正反作用:执行器的正反作用由执行机构和调节机构的正反作用组合实现:
- 气开 FC Fail Close,失气全关,输入气压越高开度越大 +正作用
- 气关 FO Fail Open,失气全开,输开度越小 -反作用
气开、气关阀的选择是处于安全考虑,压力信号中断时保证安全、降低损耗。例如:
提供热蒸汽的使用气开阀门(如果供气出现问题,及时切断热源)
提供冷却水的阀门使用气关阀门。(保证温度冷却,防止反应过热爆炸)
- 气开+ 气关-,从安全性考虑
- 被控对象(+/-) 根据输入输出判断:输入增大,输出减小,则为-
- 根据气开气关和被控对象的的正负(整个环节的乘积为 - 构成负反馈),来确定控制器的正负
- 描述工作过程:
二、单回路系统的相关计算
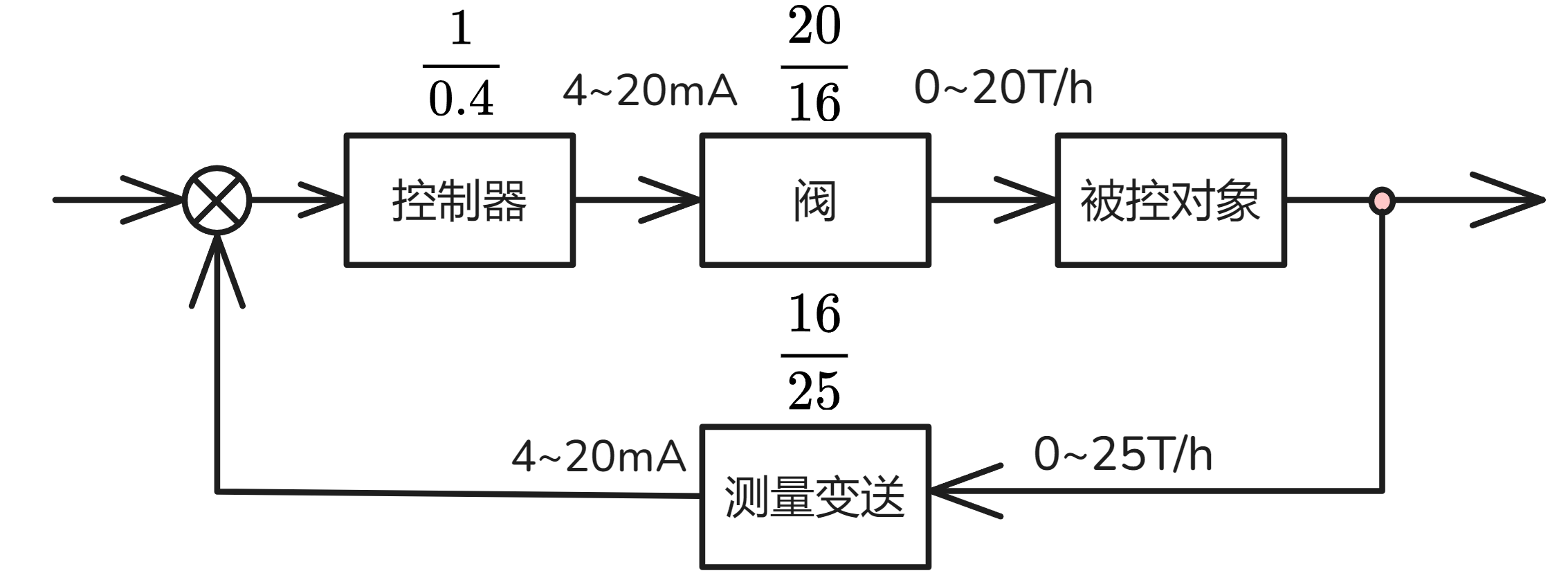
列写系统结构框图,从闭环考虑,计算传递函数!!! (注意传递函数的定义)
有一流量调节系统,其对象就是一段管道,流量用空板和电动差压变送器进行测量,变送,并经开方器变为4~20mA输出。流量测量范围为0~25T/h,调节器是比例作用,调节器输出是4~20mA信号作用于带阀门定位器的调节阀,阀的流量范围是0~20T/h。在初始条件下,流量为10T/h,调节器输出在12mA。现因生产需要加大流量将给定值提高2.5T,试问实际流量将变化多少?余差有多大?(假定调节器的比例度为40%)
三、单回路系统的投运与整定
如果控制方案已经确定,则过程各通道的静态和动态特性就已确定,系统的控制质量就取决于控制器各个参数值的设置
控制器的参数整定基础
比例度、积分时间、微分时间
最佳过渡过程 4:1 递减比一般为参考依据
理论整定(工程上采用较少)- 自整定(系统自动进行控制器调整,属于先进控制方法)
- 工程整定(简单实用,无需数学模型,可现场整定)
先用纯比例达到 4:1 衰减,将比例度放大 10%~20% ,再将积分时间由大到小逐步试凑,达到 4:1 衰减
1. 临界比例度法
- 先用纯比例控制,比例度由大到小调整,出现临界振荡,
- 记下比例度和临界振荡周期
- 根据记录下的两个数值,根据对应控制规律查表使用参数经验公式求解
- 适当调整参数
2. 衰减曲线法
- 先用纯比例控制,比例度由大到小调整,到曲线 4:1 衰减,
- 记下比例度和第一个衰减周期
- 根据记录下的两个数值,根据对应控制规律查表使用参数经验公式求解
- 适当调整参数