旋转运动学
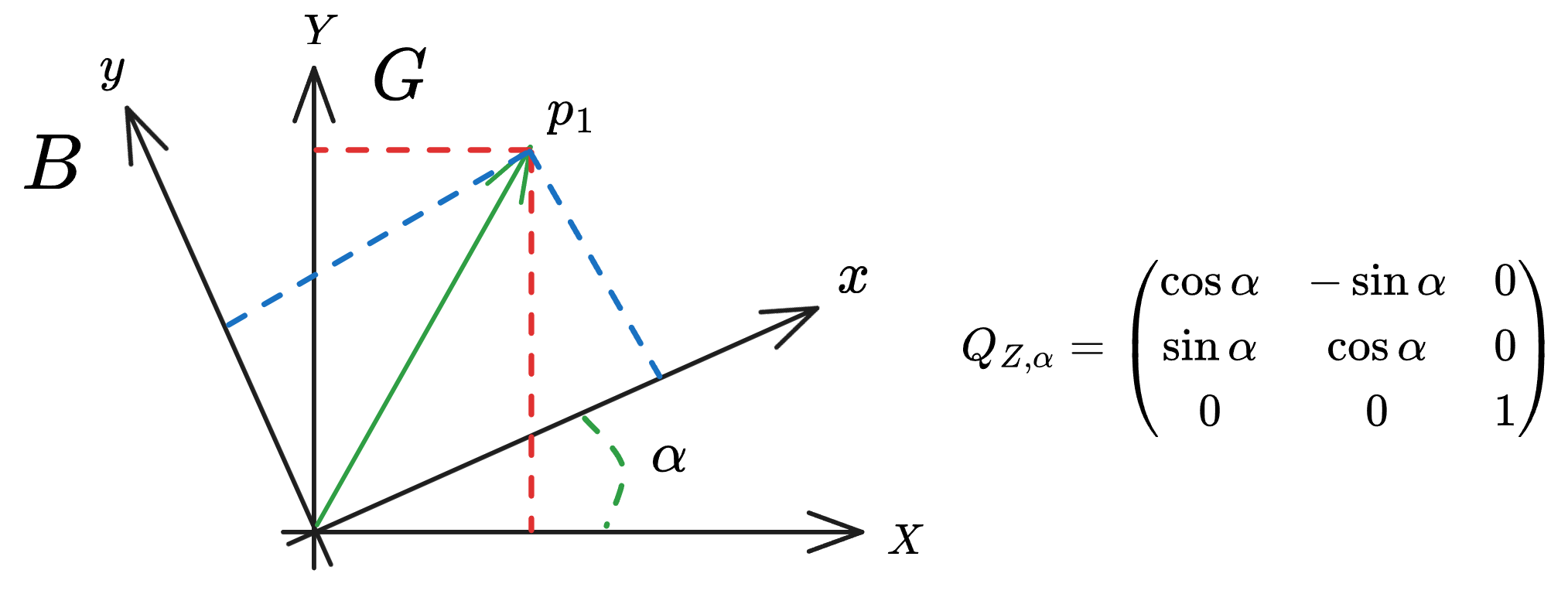
一、绕全局直角坐标系旋转
实际推导
![[test.webm]]
二、绕全局直角坐标系连续旋转
MATLAB
syms a b c
Q1=[cos(a),-sin(a),0
sin(a),cos(a),0
0,0,1
]
Q2=[cos(b),0,sin(b)
0,1,0
-sin(b),0,cos(b)]
Q3=[1,0,0
0,cos(c),-sin(c)
0,sin(c),cos(c)]
Q3*Q2*Q1
unknown
syms m n
assume(m, 'positive')
assumeAlso(m, 'integer')
assume(n, 'integer')
k=2*pi/n
Q=[1,0,0
0,cos(k),-sin(k)
0,sin(k),cos(k)]
simplify(Q^m)